top of page


ROBONERDS FLL ROBOT DESIGN
GAME CHANGERS - REPLAY







4 RUNS - 14 MISSIONS - 510 POINTS
After a lot of tests doing all the missios, we desided to do 4 runs , 14 missions and we collect a total of 510 points.

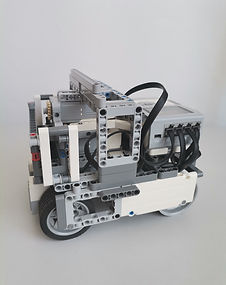
OUR ROBOT "SUZANA"
We called our robot "Suzanna" because it does a lot of "σούζες" which in Greek means wheelies.




Our Robot has:
2 Large Motors for wheels
2 Large motors for attachments
2 color sensors for line detection and following
1 Gyro sensor for straight move and accurate turns

OUR ROBOT'S HISTORY...



2019 - 2020 CITY SHAPER SEASON
At City Shaper Season our robot was very light on the back, so it could not work with heavy attachments
Suzana had:
2 Large Motors for wheels
2 Medium Motors for up - down and left right movement
2 Color sensors for line detection and following
1 Gyro sensor for straight movement and accurate turns



FOR GAME CHANGERS SEASON AT GREECE'S FINAL COMPETITION
we fixed the center of gravity but the movement on the x, y and z axes had problems. For Open international we changed the medium motors, with large motors so that we could make a high lift attachment and use two mechanisms at the same time for execute many mission.
OUR ATTACHMENTS



RUN 1 RUN 2 RUN 3
After Greece's final we joined together our previous attachments and then we made improvements so that we can do missions in parallel with greater success. Now we have less attachments.
Εach of our attachments is successful 8 out of 10 times in the execution of missions.
PREVIOUS ATTACHMENTS





Only step counter mission
Only 3 to 5 runs had success
Not strong gear and crashed
many times
It collapsed all the time
it stacked during mission
OUR ROBOT AND ATTACHMENTS FITS TO SMALL INSPECTION AREA
OUR STRATEGY
After many tests and after the final in Greece, we changed our strategy, so that we have enough time to do the missions that are located at the farthest point of the field.
We have 4 runs now instead of 5 we had before and we do 14 missions.
IN OUR 1st RUN WE USE THIS ATTACHMENT AND WE DO:

MISSIONS :
-
BASKETBALL
-
BOCCIA SHARE
-
BOCCIA AIM & FRAME
-
SLIDE AND WE COLLECT 1 HEALTH UNIT
POINTS :
-
40
-
25
-
50
-
30
TOTAL POINTS : TIME:
145 34 seconds
ATTACHMENT:

PROGRAM:


MISSIONS :
-
BENCH
-
INNOVATION PROJECT
-
HEALTH UNITS (4) at the same time
POINTS :
-
65
-
20
-
20
TOTAL POINTS : TIME:
105 4 seconds
ATTACHMENT:

PROGRAM:

IN OUR 2nd RUN WE USE THIS ATTACHMENT AND WE DO the innovation project and the bench. Also we move 4 health units to the grey area. Our robot's attachment is diagonal so it doesn't need to turn to do the missions. So, our robot can do these missions simultaneously.
IN OUR 3rd RUN WE USE THIS ATTACHMENT AND WE DO

MISSIONS :
-
STEP COUNTER
-
TREDMILL
-
ROW MACHINE
-
TIRE FLIPS (both at the same time)
-
WEIGHT MACHINE
POINTS :
-
20
-
30
-
30
-
40
-
20
TOTAL POINTS : TIME:
140 1,10 seconds
ATTACHMENTS:

PROGRAM:

4th RUN
In our 4th run we do the pull bar pass and the robot dance. We collect 35 points and the time is 10 seconds. We use no attachment.

4
MISSIONS :
-
PULL BAR PASS
-
ROBOT DANCE
POINTS :
-
15
-
20
TOTAL POINTS : TIME:
35 10 seconds
ATTACHMENT:
NO ATTACHMENT


PROGRAM:
TOTAL POINTS : 510
ΤΑ MY BLOCKS ΜΑΣ
PID_DRIVE BLOCK
THIS IS OUR PID BLOCK AND WE USE IT WITH GYRO SENSOR FOR STRAIGHT MOVE.




DRIVE BLOCK


TURN BLOCK


ANALOG FOLLOW LINE BLOCK
We had problems with the light and we deside not to use it.


CALLIBRATION PROGRAM

bottom of page